
공동활용장비

- 장비찾기
- 공동활용장비
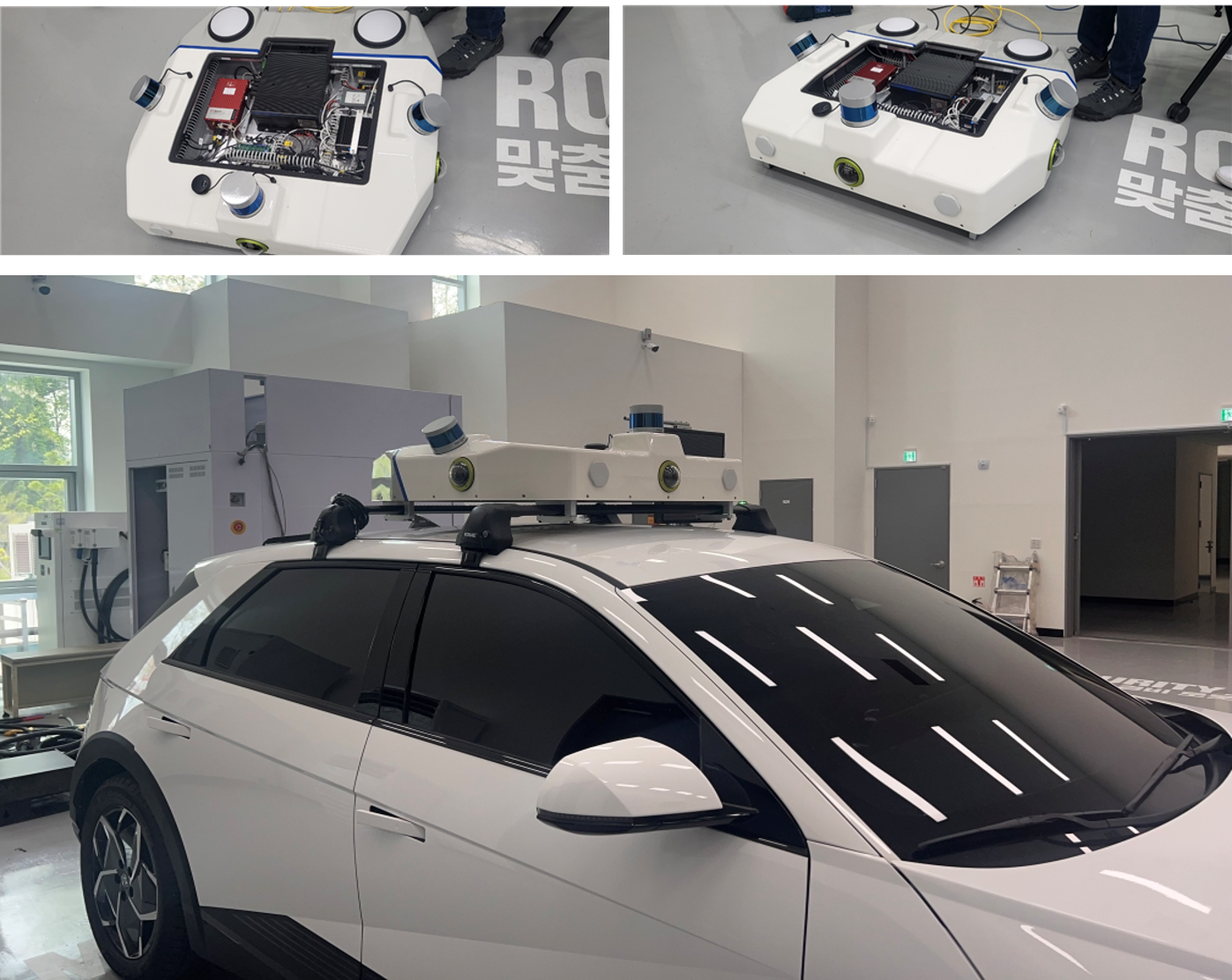
- Driving data collection system
- 실주행 기반 시나리오 데이터 취득 장비
- i-Tube No. 2310-D-0360
- NTIS No NFEC-2024-02-295073
- 설치기관 한국산업기술시험원
- 주소 경기도 화성시 기배로 60-33 (기안동)
- 담당자 이석진 (T. )
- 매뉴얼
-
온라인* 본 장비는 온라인 예약이 불가하오니 장비사용 예약과 관련해서는
예약가능여부
장비 보유기관에 직접 문의 주시기 바랍니다. (장비 예약은 Zeus 시스템에서 회원가입후 예약가능)
장비정보
-
제작사
AVL
-
모델 명
DGT
내용연수5년
-
구분
주장비
용도분석
-
표준 분류
전기·전자장비 > 측정시험장비 > 달리 분류되지 않는 측정시험장비
-
취득일
2023-10-31
취득금액459,775,600원
-
인증정보
없음
-
기능
실도로를 주행하며 주행 데이터를 수집하는 장치로 4개의 카메라, 3개의 라이다 센서, GNSS, IMU의 센서가 부착됨. OSI(Open Simulation Interface) 규격으로 데이터를 수집할 수 있는 도구임.
-
장비 상세설명
다음의 센서세트를 갖춘 실도로 데이터 수집장비.
● 1 Center LiDAR
● 2 Side LiDAR
● 4 Camera
● 1 GNSS System
● 수집되는 모든 센서 데이터는 UTC 기반으로 동기화
● 수집되는 데이터는 실시간으로 DGT Online Viewer를 통해 각 센서 데이터를 확인할 수 있음
● 수집된 데이터는 ROS 기반의 ROSBAG 파일로 출력됨
● 차량의 루프에 설치 가능한 포터블 형식임
● 차량의 전원을 사용하지 않는 별도의 전원시스템으로 구동
● 데이터 수집 장치를 설치하기 위한 별도의 차량 개조 불필요
이용안내
-
사용형태
기관의뢰
설치형태이동형
-
사용료 형태
건별
장비 사용료[Hr] 40,000원
장비설명
OSI(Open Simulation Interface) 규격으로 실도로 주행데이터를 수집할 수 있는 도구.
장비가 설치된 자차의 GNSS 데이터와 함께, 차량 주변에 대해 Camera, LiDAR 데이터를 수집.
수집된 데이터는 ROS 기반의 ROSBAG 파일로 출력되며, 전용 분석장비에 의해 수집데이터를 분석하여 OSI(Open Simulation Interface) 규격의 최종 출력데이터로 변환함.
장비 구성 및 성능
장비의 구성은 아래와 같음
● 1 Center LiDAR
● 2 Side LiDAR
● 4 Camera
● 1 GNSS System
● 2 GNSS Antenna
● 1 External Charger
● 1 Battery Pack
● 1 BRICK2 Logger in Vehicle
● Testing vehicle
주요 구성 센서의 사양은 아래와 같음
Front LiDAR
Model : Velodyne Ultra Puck VLP-32c
Measurment Range : 200m
Field of View : hor 360° / vert 40°
Side LiDAR
Model : Velodyne Ultra Puck VLP-16c
Measurment Range : 100m
Field of View : hor 360° / vert 30°
Front CAMERA
Model : Dalsa GENIE Nano-C4030
Resolution : 4112 x 2179 (8.9MP)
Side, Rear CAMERA
Model : Dalsa GENIE Nano-C2030
Resolution : 2064 x 1544 (3.2MP)
GNSS
Model : OxTS RT3003 (GPS/IMU)
Position Accuracy : 0.4m DGPS / 0.01m RTK
서울특별시 강남구 테헤란로 305 한국기술센터 2~7, 14층, 16~17층, 21층
TEL : 02-6009-3000 / i-Tube 대표문의: 1811-9126
Copyrightⓒ 2020 KIAT All rights reserved.