
공동활용장비

- 장비찾기
- 공동활용장비

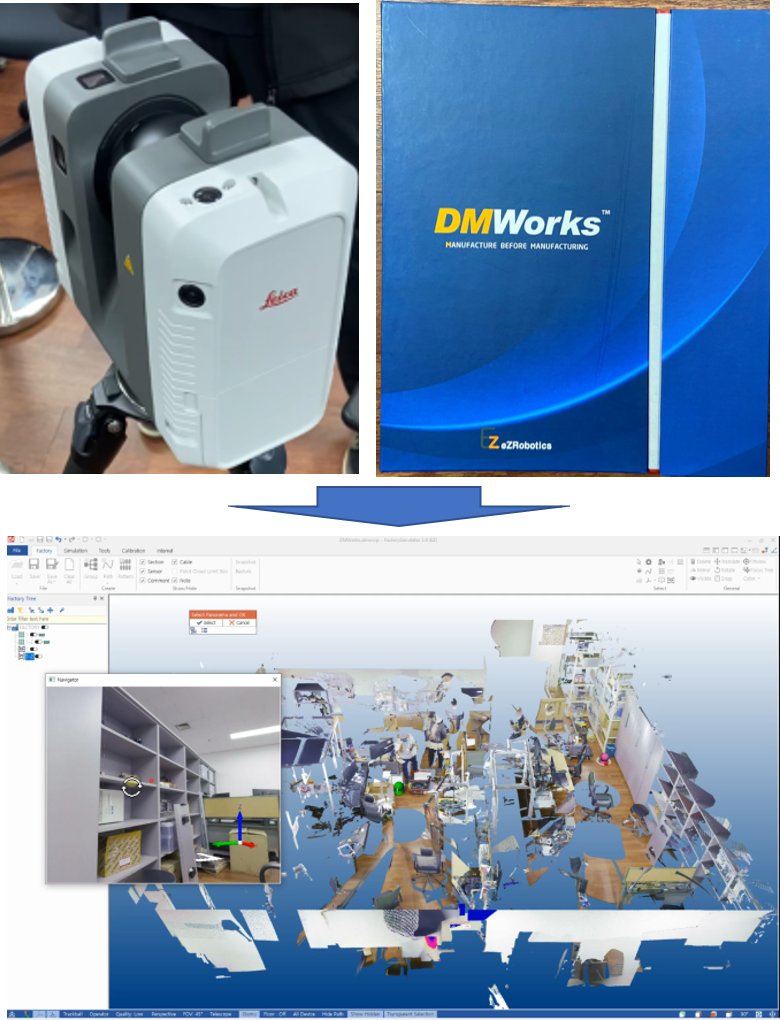

- 3D Workspace Recognition Sensor and SW
- 3차원 공간 인식 센서 및 SW
- i-Tube No. 2204-A-0161
- NTIS No NFEC-2022-05-278916
- 설치기관 한국전자기술연구원
- 주소 서울특별시 강남구 광평로39길 112 (수서동)
- 담당자 정병진 (T. 032-621-2817 )
- 매뉴얼
-
온라인* 본 장비는 온라인 예약이 불가하오니 장비사용 예약과 관련해서는
예약가능여부
장비 보유기관에 직접 문의 주시기 바랍니다. (장비 예약은 Zeus 시스템에서 회원가입후 예약가능)
장비정보
-
제작사
Leica Geosystems
-
모델 명
RTC360
내용연수9년
-
구분
주장비
용도시험
-
표준 분류
광학·전자 영상장비 > 카메라/영상처리장비 > 3D스캐너
장비활용범위공동활용서비스
-
취득일
2022-04-06
취득금액359,015,600원
- 인증정보
-
기능
-고정밀 로봇 작업공간 3차원 데이터 취득
: 초당 최대 2,000,000 points 이상 취득, 스캔 범위: 수평 360° 수직 300°, 측정 거리: 최소 0.5 ~ 최대 125m, 각 정밀도 18″, 거리정밀도 1mm+10ppm, 3차원 포인트 정밀도: 1.9mm@10m
-3차원 공간 후처리 기능 및 사용 편의성 지원 기능
: 로봇 작업 공간 자동 정합 기능, 필터링 기능 : 실시간 테블릿PC 또는 모바일 폰으로 데이터 확인 및 거리, 면적, 각도 측정
-3차원 작업공간 시각화 및 로봇 시뮬레이션 SW
: 작업공간 3D 데이터, 다양한 종류의 CAD, 시뮬레이션 데이터 Import : 로봇 제어를 위한 Motion Dialog 기능 제공, 국내외 로봇별 로봇 라이브러리 제공 : 로봇 툴(용접, 도장, SCAN 등) 정의를 위한 편리 기능을 보유한 환경 제공 : Calibration 기능 : 로봇 Off-Line Program 기능 -
장비 상세설명
- 로봇 작업 공간에 대한 고정밀 다량의 3차원 데이터를 취득하며, 3차원 데이터를 시각화하고 시뮬레이션 환경 제공
- 3차원 공간 3D 데이터 취득(스캔) 센서 / 3차원 작업공간 시각화 및 로봇 시뮬레이션 SW로 구성
이용안내
-
사용형태
기관의뢰
설치형태이동형
-
사용료 형태
시간별
장비 사용료[Hr] 100,000원
장비설명
- 본 장비는 공작 기계 등 일반 기계와 연동을 통한 머신 텐딩과 같은 다양한 공정 수행하는 협업 지능 실증을 위해,
로봇이 작업하는 공간에 대한 인식이 필요함.
- 로봇 작업 공간에 대한 고정밀 다량의 3차원 데이터를 취득하며, 3차원 데이터를 시각화하고 시뮬레이션 환경에서 로
봇 모션 등을 테스트함
- 이를 위해, 고정밀 다량의 3차원 데이터 취득 센서와 이를 시각화하고 시뮬레이션 할 수 있는 SW로 구성
장비 구성 및 성능
· 센서 측정 속도는 초당 최대 2,000,000 points 이상
· 현장에서 빠른 데이터 취득을 위해 스캔 및 HDR 이미지 촬영을 90초 이내로 데이터를 확보
· 스캔 범위: 수평 360° 수직 300° 스캔 되어야 함
· 측정 거리: 최소 0.5 ~ 최대 125m
· 3차원 공간 3D 데이터 취득 센서에서 취득한 데이터를 오픈하여 활용
· 로봇 제어를 위한 Motion Dialog 기능 제공하고, 로봇 작업프로그램 생성, 검토, 수정
· Calibration 결과를 반영하여 가상 작업장과 실제 작업자의 오차를 최소화
· 로봇 Off-Line Program의 결과를 실제 현장에서 큰 오차없이 사용 가능하도록 기능을 제공
· 로봇 Off-Line Program의 경우, 3종 이상 로봇(예, HYUNDAI HI5, HI5a, ABB, KUKA 등)에 대해 제공
서울특별시 강남구 테헤란로 305 한국기술센터 2~7, 14층, 16~17층, 21층
i-Tube 대표문의 : 1811-9126 / KIAT 대표 콜센터 : 02-6009-3000