
공동활용장비

- 장비찾기
- 공동활용장비

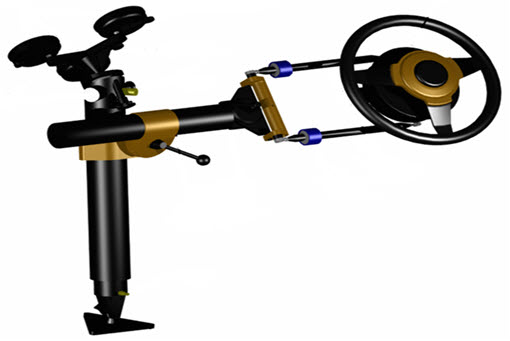

- Steering Test System
- 자동 조향 로봇 시스템
- i-Tube No. 1203-F-0035
- NTIS No NFEC-2012-03-155434
-
설치기관
지능형자동차부품진흥원 미래차시험연구센터
((재)지능형자동차부품진흥원)

- 주소 대구광역시 달성군 구지면 과학서로 201 (창리)
- 담당자 박상협 (T. )
- 매뉴얼
-
온라인* 본 장비는 온라인 예약이 불가하오니 장비사용 예약과 관련해서는
예약가능여부
장비 보유기관에 직접 문의 주시기 바랍니다. (장비 예약은 Zeus 시스템에서 회원가입후 예약가능)
장비정보
-
제작사
ABDynamics
-
모델 명
SR60
내용연수9년
-
구분
주장비
용도시험
-
표준 분류
물리적 측정장비 > 달리 분류되지 않는 물리적 측정장비 >
-
취득일
2012-03-07
취득금액359,390,000원
- 인증정보
- 기능
- 장비 상세설명
이용안내
-
사용형태
기관의뢰 직접사용
설치형태이동형
-
사용료 형태
시간별
장비 사용료89,000원
장비설명
스티어링 로봇 시스템은 도로 차량의 조향 시스템을 정확하게 반복 입력을 할 수 있도록 응용하기 위한 기계이다. 어떠한 상황에서는 10Hz이상에서 사용될 수 있지만 기본적으로 DC 5Hz에서 작동하게 설계되어있다. 이 로봇은 모터로 구동되며 스티어링 휠의 각도별 위치 및 토크를 측정 할 수 있는 트랜스듀서를 가지고 있다. 또한 보통의 차량에 설치하고 작동하기 쉽게 설계되어 있으나 차량의 조향 시스템을 컨트롤하기 때문에 때로는 위험할 수 있으므로 적절한 훈련을 받은 사람들에 의하여 운영 되어야 한다.
장비 구성 및 성능
1. Steering Robot Test System-Motor type : Brushless type-최대 토오크 : 70Nm 이상-최대속도 : 1,800deg/s 이상-각도분해능 : ≤ 0.05deg-각도정밀도 : ≤ 0.3deg-Torque Sensor Type & Performance-Strain gage type, ±125Nm(nominal) 이상-직선성 : 0.3% 이하(FSO)-히스테리시스 : ±0.05% 이하(FSO)2. Main Controller-기본 입력 채녈 : Analogue(±10V) 16ch 이상, Encoder(5V TTL) 1ch 이상, Digital(for triggering) : 2ch 이상-기본 출력 채녈 : Analogue(±10V) 5ch 이상, Digital(for triggering) : 3ch 이상-Standard communications : USB, Ethernet, CAN Module-Spare slot : 3ch 이상3. Height Sensor Package & Outrigger- Height Sensor HF-500C X 10ea (measurement range : 125 ~ 625mm)- Outrigger Standard Type : 2,725kg
서울특별시 강남구 테헤란로 305 한국기술센터 2~7, 14층, 16~17층, 21층
TEL : 02-6009-3000 / i-Tube 대표문의: 1811-9126
Copyrightⓒ 2020 KIAT All rights reserved.